





ORCA ist ein Tailsitter-VTOL, steht also beim Start und der Landung auf dem Heck. Bei diesem Konzept sind nur 4 Motoren nötig (2 an den Flügeln und 2 an der Finne), außerdem muss keiner der Motoren mit einem Servo oder Aktuator bei der Transition vom Hoverflug zum Flächenflug gekippt werden. Im Flächenflug erzeugen die zwei Motoren an den Flügeln genug Vortrieb zum Fliegen, sodass für den Reiseflug die Motoren an der Finne abgeschaltet werden. Aufgrund dieser Doppelfunktion der Motoren und der Einschränkung auf kommerziell verfügbare Motoren und Propeller muss ein Kompromiss zwischen Hover- und Flächenflug gewählt werden. Dadurch kann bei der Effizienz nicht das volle Potential der Motor-Propeller-Kombination ausgeschöpft werden, allerdings wird das Gewicht und der Wartungsaufwand für weitere Antriebe oder Aktuatoren eingespart.
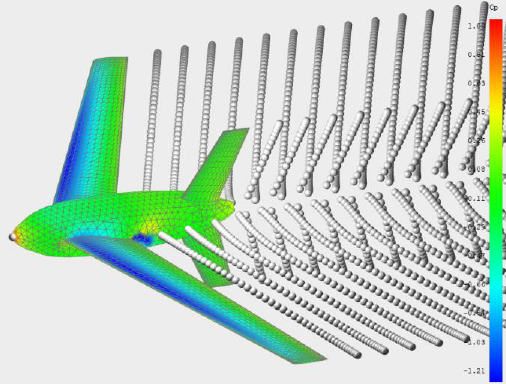
Der Auftrieb im Flächenflug wird von dem Nurflügel erzeugt, der mit insgesamt vier KST X10-Servos für Querruder, Höhenruder, Landeklappen- und Bremsklappenstellungen ausgestattet ist. Die Spitzen des Flügels dienen zusammen mit den Spitzen der Finne als Landewerk. Durch die Nurflügelkonfiguration muss kein Höhenleitwerk mit entsprechendem Hebelarm eingesetzt werden und der Rumpf bleibt kurz. Die Tragflächen sind über eine Steckverbindung mit dem Rumpf verbunden, dadurch ist ORCA im demontierten Zustand sehr kompakt und transportabel. Die aerodynamische Flügelauslegung fand mit den Tools XFLR5 und flow5 statt. Zusammen mit den gesammelten Erfahrungen aus den Prototypen konnte so ein leistungsfähiger Nurflügel entwickelt werden, der sich in der Flugerprobung bewährt hat.
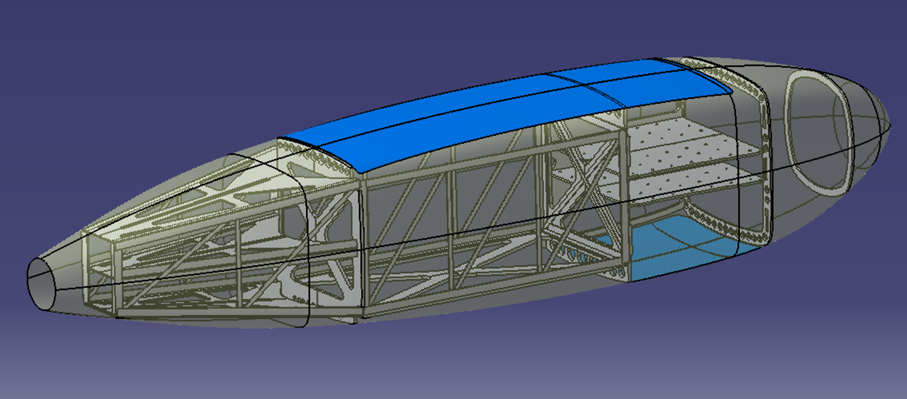

Die Flügel bestehen aus einem Schaumkern aus Styropor, der durch Balsaholzrippen gestützt und von einer GFK-Schale umschlossen wird. Der Schaumkern wurde mit einer eigens dafür konstruierten Hotwire-CNC-Maschine hergestellt, die softwareseitig auf Open Source Systemen basiert. Um trotz der hohen Pfeilung des Flügels eine hohe Fertigungsgenauigkeit zu erreichen wurden umfangreiche Parameterstudien geführt. Die Balsaholzrippen unterteilen den Flügel in zwölf Segmente (Bild rechts). Sie sind mit dem Steg verzahnt und wurden mit einem Lasercutter gefertigt. Der Steg bildet zusammen mit an den Oberflächen auflaminierten CFK-UD-Bändern einen Holm mit I-Profil entlang der 25% Linie des Flügels. Dieser Kompositholm nimmt das Biegemoment entlang des Flügels auf. Die GFK-Schale, die die Kerne und Rippen umschließt, besteht aus ±45° um der Torsion entgegen zu wirken.